
Current supplied produces interacting magnetic field which keeps the motor spinning
The function of the components of motor are as follows:
- Armature: laminated (reduces eddy current) ferromagnetic cylinder, rotates on axle to give actual motion, concentrates magnetic field to increase
- Coil: Wrapped around armature, medium for current, better motion with more coils at right angles
- Split ring commutator: Changes direction of current to allow motion to continue
- Brushes: Allows current flow into split ring
- Magnets: Produce external magnetic field, curved magnets can improve torque (coil plane is always parallel)
- Axle: provides centre of rotation
Torque production
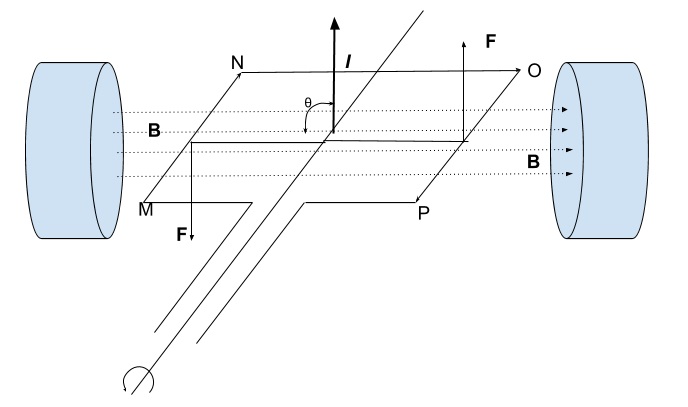
- Torque due to a force is defined as :
- distance d is the distance of OP and MN from the axis of rotation.
 , where w is the width of the conductor loop
, where w is the width of the conductor loop- so

- Force on a current carrying wire :

- now conductor NO and MP are parallel to the magnetic field so no force acts on then

- conductor MN and OP are always perpendicular to the magnetic field , so force on them is F = IlB where l is the length of MN and OP.
- now conductor NO and MP are parallel to the magnetic field so no force acts on then
- So using
 and F = IlB , we get
and F = IlB , we get
 , for NM and OP
, for NM and OP
- If n loops are wounded, then the formula becomes
 , where
, where
 is the angle between direction of area (of loop) and direction of magnetic field.
is the angle between direction of area (of loop) and direction of magnetic field.
Back emf in electric motor:
- Energy must be conserved.
- Therefore back EMF must opposite to supplied. Otherwise there would be an unchecked increase.
- This reduces the efficiency of the motor.
- A smaller back EMF gives a greater current under load.
- Slower spin gives a lower back EMF
- Vnet = Vsupply – EMFback
- When starting there is a low back EMF and the high current could burn the motor out.
- Variable resistance is used until more back EMF is produces
A steady speed is produced when Vsupply = EMFback
Extract from Physics Stage 6 Syllabus © 2017 NSW Education Standards Authority (NESA)